Κανόνες Εργαστηρίου

Βασικές Οδηγίες
SID 2023
Safe Internet Day
|
|

Γ' Λυκείου
![]()
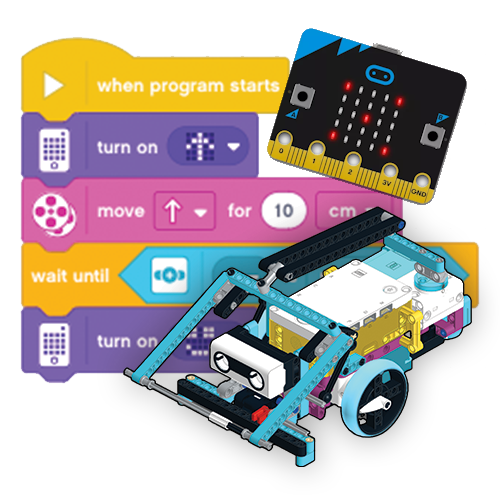
Βασικές κινήσεις.
Μέρος Α: Κατασκευή του Robot.
Οι οδηγίες για την κατασκευή του Robot είναι εδώ.
Μέρος Β: Αρχικές ρυθμίσεις.
Για να κάνουμε ένα Ρομπότ τύπου rover να κάνει βασικές κινήσεις δηλαδή, να προχωρά εμπρός, πίσω και να στρίβει όπως θέλουμε εμείς, πρέπει πρώτα να καθορίσουμε κάποια πράγματα.
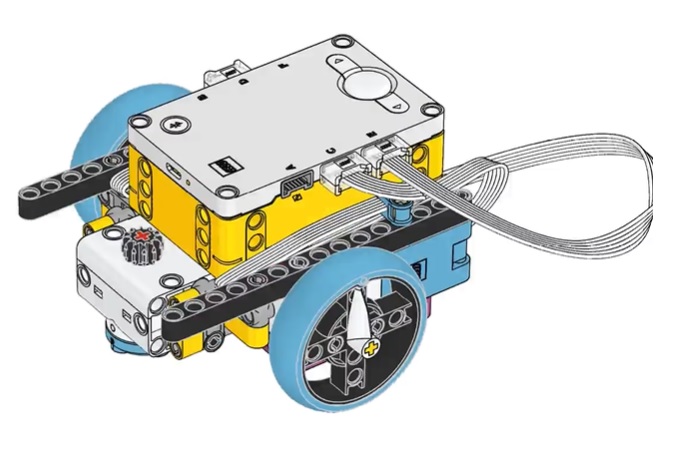
Έτσι λοιπόν πρώτα συνδέουμε τους κινητήρες στις θύρες Α και Ε (Αριστερός και Δεξιός αντίστοιχα).
Με τις παρακάτω εντολές, ενημερώνουμε το Ρομπότ ότι: 
1) οι κινητήρες είναι στις θύρες Α και Ε και θα κινούνται ταυτόχρονα,
2) η ταχύτητα θα είναι στο 50%,
3) όταν σταματά την κίνηση θα κρατά την θέση του.
Η τελευταία εντολή ορίζει τον τρόπο που σταματά το Robot και οι επιλογές της φαίνονται στην πιο κάτω εικόνα.
Συνήθως χρησιμοποιούμε τις τιμές
brake ή hold position.
Η εντολή αυτή βρίσκεται στις επιπλέον εντολές οι οποίες δεν υπάρχουν στο βασικό μενού.
Μέρος Γ: Μέγεθος τροχών και ρύθμιση απόστασης.
Πρώτα πρέπει να υπολογίσουμε πόσα εκατοστά είναι μια ολόκληρη περιστροφή του τροχού μας, ώστε να γνωρίζει το Robot πόσο πρέπει να περιστρέψει τους κινητήρες για να κινηθεί όσα εκατοστά θέλουμε.
Μέθοδος 1
| Μετράμε την Διάμετρο του τροχού ή βλέπουμε το μέγεθος που είναι γραμμένο επάνω του σε mm (χιλιοστά) και το διαιρούμε με το 10 (γιατί 1 cm = 10 mm). Αυτό που βρίσκουμε το πολλαπλασιάζουμε με το 3,14 (δηλαδή τον αριθμό π) και βρίσκουμε την περίμετρο του τροχού σε εκατοστά. |
Παράδειγμα:
1. Έστω ότι ο τροχός έχει μέγεθος 56 mm.
2. Η Διάμετρός του σε εκατοστά είναι 56 : 10 = 5,6 cm
3. Η περίμετρος είναι 5,6 x 3,14 = 17,5 cm
Άρα: Με κάθε ολόκληρη περιστροφή του τροχού το Robot μετακινείται 17,5 εκατοστά.
Το νούμερο αυτό πρέπει να δηλωθεί με την εντολή που φαίνεται δίπλα:
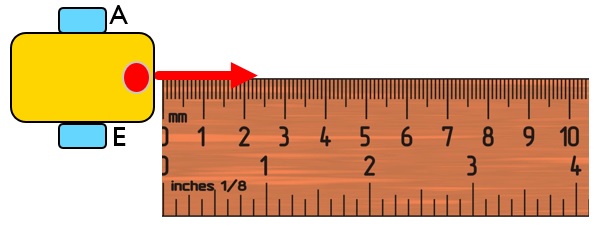
Μέθοδος 2
| Εάν δεν είμαστε και τόσο καλοί στα Μαθηματικά και τη Γεωμετρία τότε, τοποθετούμε την άκρη του Robot στην αρχή (0 cm) ενός χάρακα (βλέπε την εικόνα πιο κάτω) και το μετακινούμε προσεκτικά σε ευθεία (χωρίς να κάνει στροφές ή ζικ - ζακ) μέχρι ο τροχός του να κάνει μια ολόκληρη περιστροφή. Μετά σημειώνουμε στα πόσα εκατοστά σταμάτησε ή άκρη του ρομπότ κι έτσι βρίσκουμε πόσα εκατοστά αντιστοιχούν σε μια περιστροφή του τροχού. Προσοχή: Η μέθοδος αυτή επειδή είναι πρακτική χρειάζεται μεγάλη ακρίβεια στην εκτέλεσή της. |
Μέρος Δ: Δημιουργία προγράμματος.
Η δημιουργία του προγράμματος γίνεται με τον τρόπο που δείχνουν οι πιο κάτω εικόνες στο περιβάλλον scratch της Lego Prime.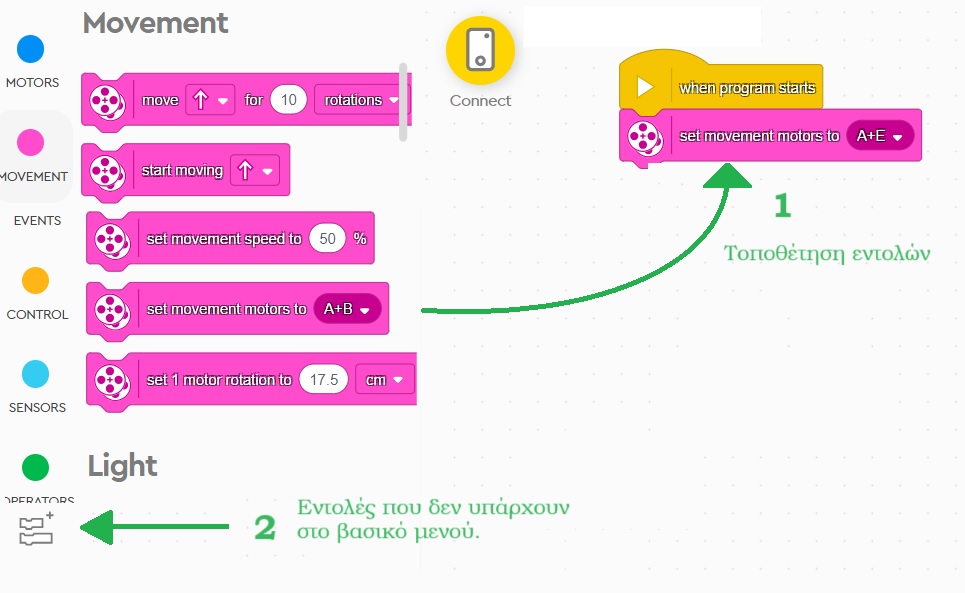
Έτσι λοιπόν οι εντολές που πρέπει να δοθούν στο Robot αρχικά ώστε να μπορεί αυτό να υπολογίσει την κίνηση που θα του δώσουμε είναι οι εξής: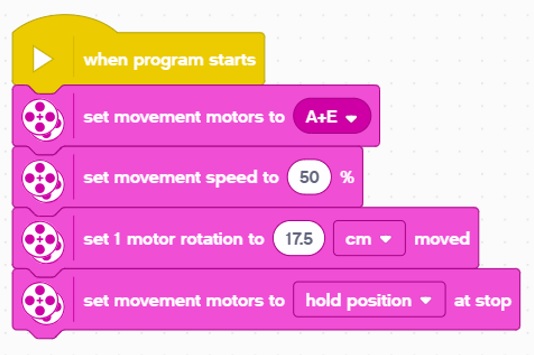
Μέρος Δ: Εντολή κίνησης εμπρός - πίσω.
Αφού δημιουργήσουμε το πιο πάνω μπλοκ εντολών για την αρχικοποίηση του Robot χρησιμοποιούμε την πιο κάτω εντολή για να κινηθεί εμπρός ή πίσω όσα εκατοστά θέλουμε.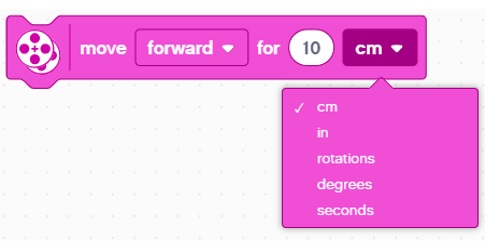
Όπως βλέπουμε μπορούμε να δώσουμε εντολή στο Robot να κινηθεί σε ίντσες ή σε συγκεκριμένες περιστροφές των τροχών του ή σε συγκεκριμένες μοίρες ή να κινηθεί για συγκεκριμένο χρόνο σε δευτερόλεπτα.