Κανόνες Εργαστηρίου

Βασικές Οδηγίες
SID 2023
Safe Internet Day
|
|

Γ' Λυκείου
![]()
Βασικές κινήσεις & στροφές.

Οι οδηγίες για την κατασκευή του Robot είναι εδώ.
Στο προηγούμενο μάθημα(Βασικές Κινήσεις) είδαμε ότι για να κάνουμε ένα Robot τύπου rover να κάνει βασικές κινήσεις δηλαδή, να προχωρά εμπρός, πίσω και να στρίβει, πρέπει πρώτα να δημιουργήσουμε τις παρακάτω εντολές ώστε να γνωρίζει το Robot τι υπολογισμούς πρέπει να κάνει.
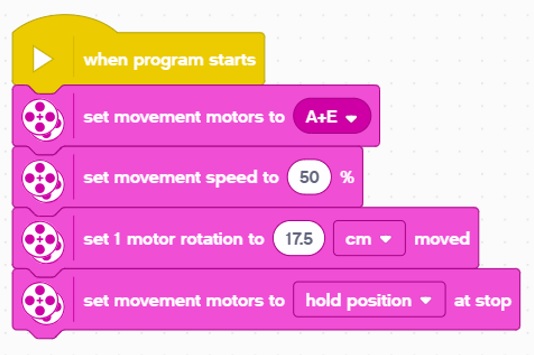 |
Έτσι λοιπόν πρέπει:
|
Aφού δημιουργήσουμε τις πιο πάνω Αρχικές Εντολές, μπορούμε με την εντολή move όπως φαίνεται πιο κάτω να κινήσουμε το robot εμπρός ή πίσω μετρώντας την απόσταση σε εκατοστά, με μεγάλη ακρίβεια.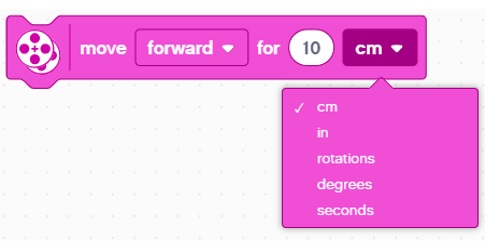
Μέρος B: Πως θα στρίψουμε;
Για να στρίψει το συγκεκριμένο Robot θα πρέπει η μια ρόδα να παραμείνει σταθερή. Δηλαδή θα κινείται μόνο ο ένας κινητήρας.
Κατά την στροφή δημιουργείται μια γωνία η οποία μετριέται σε μοίρες.

Έτσι λοιπόν έχουμε δύο επιλογές:
- Να χρησιμοποιήσουμε την εντολή run από την μπλε ομάδα των εντολών των κινητήρων, ώστε να κινηθεί ο ένας κινητήρας, αφού έτσι κι αλλιώς ο άλλος πρέπει να είναι ακίνητος.
 Για τους τροχούς με περίμετρο 17,5 εκατοστά η 1 περιστροφή αντιστοιχεί σε γωνία 90 μοιρών. Εάν η στροφή πρέπει να είναι μεγαλύτερη από 90 μοίρες τότε αυξάνουμε τον αριθμό στην εντολή run από 1,01 μέχρι 1,99. Αντίστοιχα εάν θέλουμε μικρότερη στροφή από 90 μοίρες μειώνουμε τον αριθμό στην εντολή run από 0,99 μέχρι 0,01.
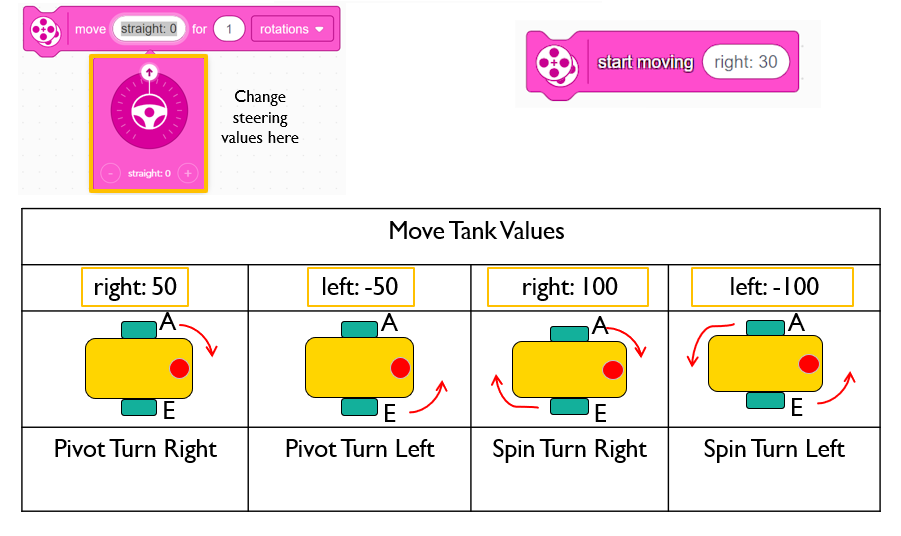
Για τους τροχούς με περίμετρο 17,5 εκατοστά η 1 περιστροφή αντιστοιχεί σε γωνία 90 μοιρών. Εάν η στροφή πρέπει να είναι μεγαλύτερη από 90 μοίρες τότε αυξάνουμε τον αριθμό στην εντολή run από 1,01 μέχρι 1,99. Αντίστοιχα εάν θέλουμε μικρότερη στροφή από 90 μοίρες μειώνουμε τον αριθμό στην εντολή run από 0,99 μέχρι 0,01. - Να χρησιμοποιήσουμε την εντολή move από την ομάδα συνδυασμένων κινήσεων (movement)
 Η εντολή αυτή είναι πιο πολύπλοκη καθώς πρέπει να συνδυαστούν περισσότεροι παράμετροι. Για να στρίψουμε δεξιά 90 μοίρες πρέπει να ορίσουμε
Η εντολή αυτή είναι πιο πολύπλοκη καθώς πρέπει να συνδυαστούν περισσότεροι παράμετροι. Για να στρίψουμε δεξιά 90 μοίρες πρέπει να ορίσουμε
right: 50 for 1 rotation.
Προσοχή.
| Όταν στρίβουμε είναι πολύ σημαντικό να γίνεται με μειωμένη ταχύτητα για να υπάρχει μεγαλύτερη ακρίβεια. Για παράδειγμα εάν έχουμε ορίσει αρχικά την ταχύτητα κίνησης 50% όπως φαίνεται πιο πάνω τότε πριν στρίψουμε ορίζουμε ξανά την ταχύτητα στο 20%. |
|
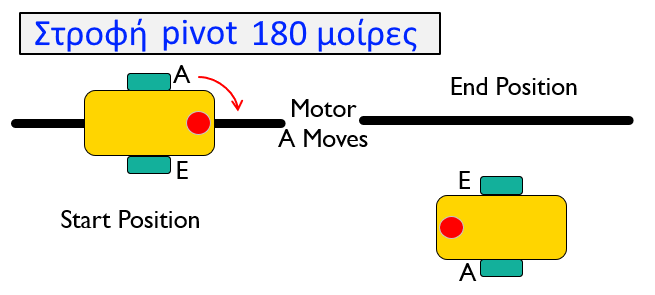
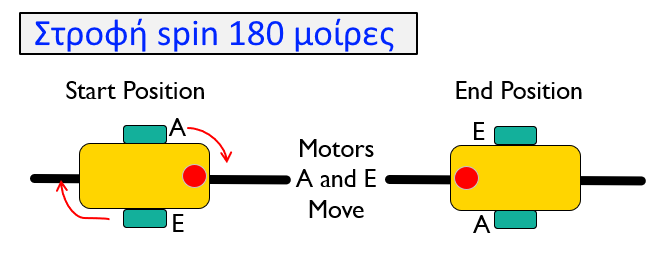
Υπάρχουν δύο είδη στροφών
Δείτε πως χρησιμοποιώ την εντολή MOVE για να κάνω στροφές Pivot ή Spin 180 μοιρών.
Γράφοντας στις εντολές MOVE ή Start Moving right:50 το robot θα κάνει Δεξιά στροφή Pivot 90 μοιρών.
Γράφοντας στις εντολές MOVE ή Start Moving right:100 το robot θα κάνει Δεξιά στροφή Spin 90 μοιρών. |
Δραστηριότητα 1
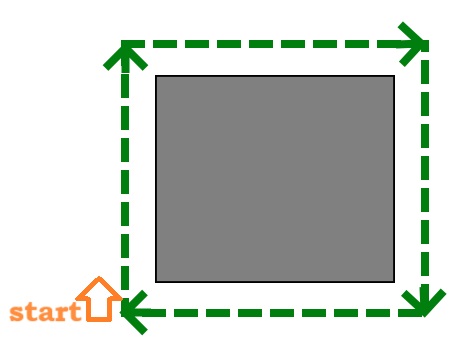
- Δημιουργείστε το κατάλληλο πρόγραμμα ώστε το Robot να εκτελεί τις κινήσεις που φαίνονται στα παρακάτω σχήματα:
α. β.
β. 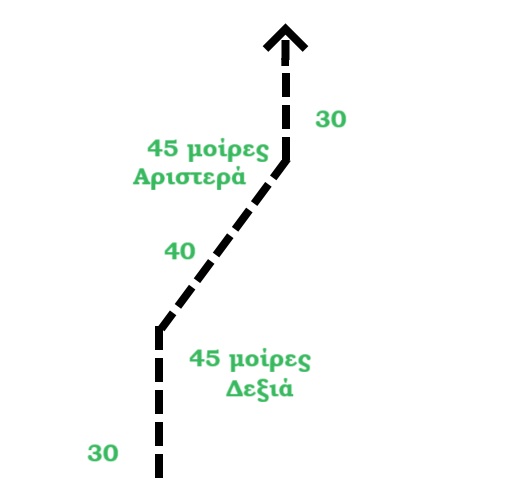
Δραστηριότητα 2
- Μετρήστε τις διαστάσεις ενός χάρτινου κιβωτίου που θα βρείτε στο εργαστήριο και δημιουργείστε το κατάλληλο πρόγραμμα στο Robot για να κινείται 1 φορά γύρω από αυτό, χωρίς να το αγγίξει.
- Να αξιοποιήσετε την εντολή repeat από την ομάδα εντολών control για να δημιουργήσετε πιο μικρό πρόγραμμα.
 .
.